補助事業番号 2022M-279
補助事業名 2022年度 寄り道移動制御を用いた高スループットの
アドホックネットワーク構築 補助事業
補助事業者名 名古屋大学
1 研究の概要
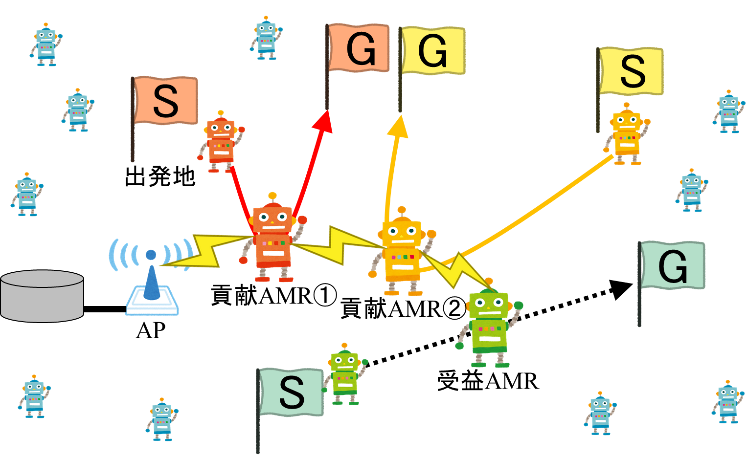
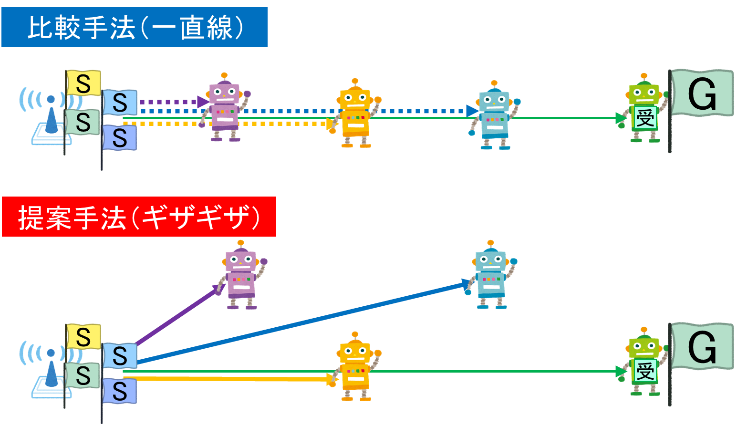
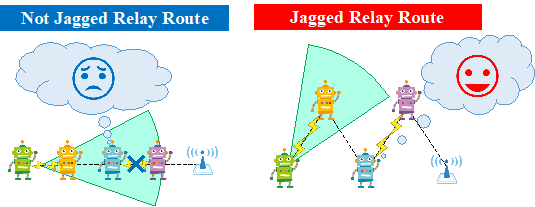
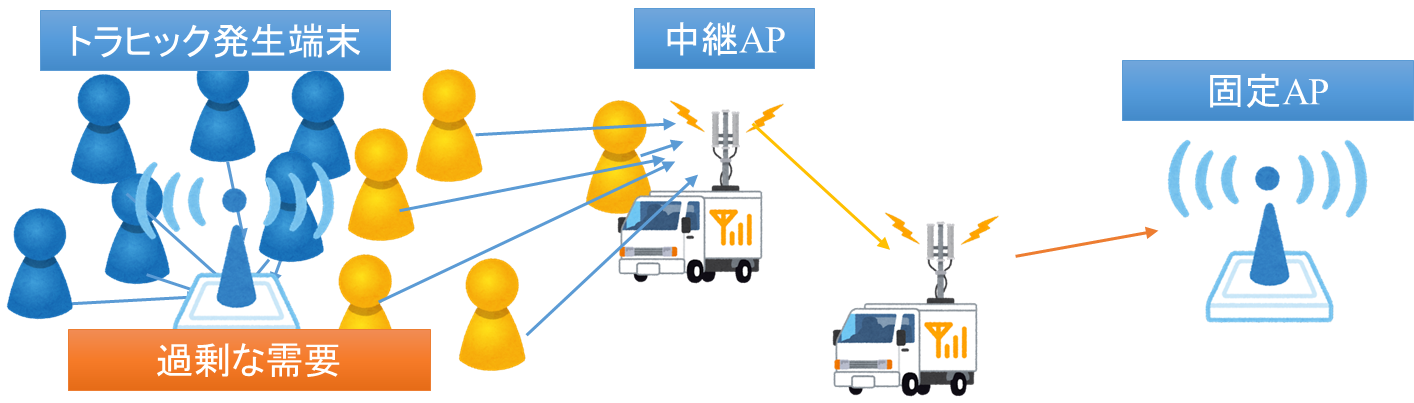
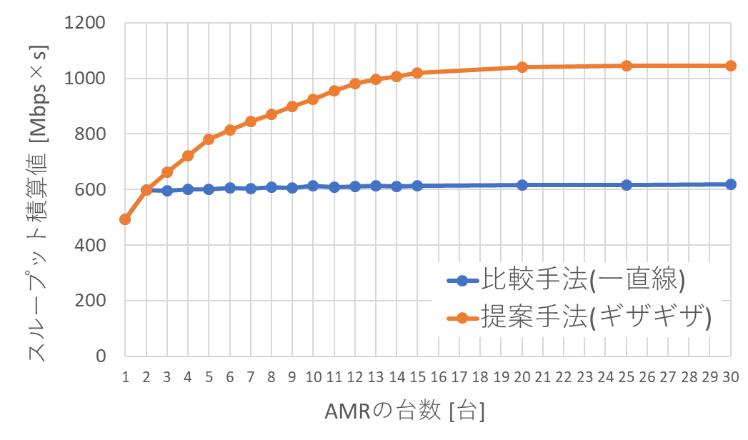
受益者が望んでいる支援者の経済負担とならない移動を実現するために、ガイド無しAMRの実現化を促進するための高品質通信手段を与えるのが本事業である。目的地を設定したAMR(例えば電動車椅子)が自動運転(自立運転)できれば、ニーズは満たされる。ただし、現状では、自動運転あるいは遠隔操縦するために必要なLiDARやビデオカメラの画像情報はクラウドやエッジに送信して情報処理を行う。このためには高品質な通信ネットワークが必要であるが、5G/LTEは高価であるため、AMRの普及を阻害する要因となっている。そこで、本事業では、安価な無線LANを用い、AMR同士がデータを中継するアドホックネットワークを利用して通信を行う。AMR同士が適度な距離に存在すれば、高性能な無線中継が行えるため、高い通信品質を得ることができる。ただし、各AMRは各自の目的地に向かって移動しているので、そうはならない恐れがある。そこで、目的地までの移動経路を最短経路では無く、寄り道させることで、AMR同士を適度な距離に近づけることができる。この寄り道において、どのAMRをいつどの経路で寄り道させるかが性能のポイントであり、これを寄り道移動制御として、開発する。
2 研究の目的と背景
【研究の社会的背景】
高齢者の増加と少子化による労働人口の減少問題から、自由な移動を保証する「足」の確保は喫緊の課題である。公共交通機関の端点から自宅までやスーパーマーケットから自宅までのドアツードアといったラストワンマイルの移動をどう保証していくがが高齢化日本の大きな課題である。電動の車イスのような(荷物のみを載せるものも含めて)自律走行型ロボット(AMR)は、比較的低速で免許も不要で安価であるため自動運転のターゲットとして期待されている(図1,2,3)。しかしながら、自動運転に要する5G/LTE通信費用が普及の妨げとなっている。
図1 無人宅配ロボットが公道を走る実証実験
https://www.yomiuri.co.jp/economy/20201007-OYT1T50132/
図2 日本郵便が宅配を無人自律走行ロボットで
https://newswitch.jp/p/24107
図3 松屋(牛丼チェーン店)の自動宅配デリバリー実証実験
https://www.matsuyafoods.co.jp/whatsnew/topics/38443.html
【研究が目指す社会の姿】
AMRから無料WiFiのホットスポットまでAMR同士あるいは協力スポットに置かれている中継局が中継するアドホックネットワーク技術を用いて、高品質かつ途切れない通信ネットワークを安価に実現する。車椅子型のAMRに乗って、最寄りのバス停まで向かう。AMRは勝手に自宅に戻る。時間指定により帰りのバス停に迎えに来てくれる。鉄道駅までコンテナで運ばれた宅配荷物は、荷物型AMRに積み込まれ、各家に向かう。近所での買い物では、AMRが荷物を持ち帰ってくれるので手ぶらで帰れる。といった社会を実現する。
【研究の受益者とそのニーズ】
一般市民および交通事業者が受益者である。また運転や歩行が困難な老人・障害者も受益者であるとともに、これらの人々の移動や散策を支援する人々も受益者である。さらに、若者・健常者においても、往復とも手ぶらで快適な買い物をしたい要求を持つ人々が受益者である。
現在は、これらは親・子・親戚・タクシー会社・支援事業者・宅配業者が負担しているが、その介護量・時間・コストは、大きな経済負担となっている。宅配事業者は、宅配要員の確保に腐心している。深夜早朝の集荷・配達あるいは人々の移動も容易になる。
3 研究内容
2022年 09月01日 寄り道通信制御のモデル化(図A,B,C)
11月01日 通信制御モデルの性能評価(図D)
12月01日 論文執筆
2022年 04月01日 多数台のAMRの寄り道通信制御のモデル化(図E)
06月01日 性能評価(図F)
07月01日 論文執筆
2023年 04月01日 モデル化および性能評価
06月01日 実機実験(図G,H,I)
08月01日 論文執筆
2023年 10月01日 モデル化(図J)
11月01日 論文執筆
2024年 01月01日 性能評価(図K,L,M)
02月01日 論文執筆
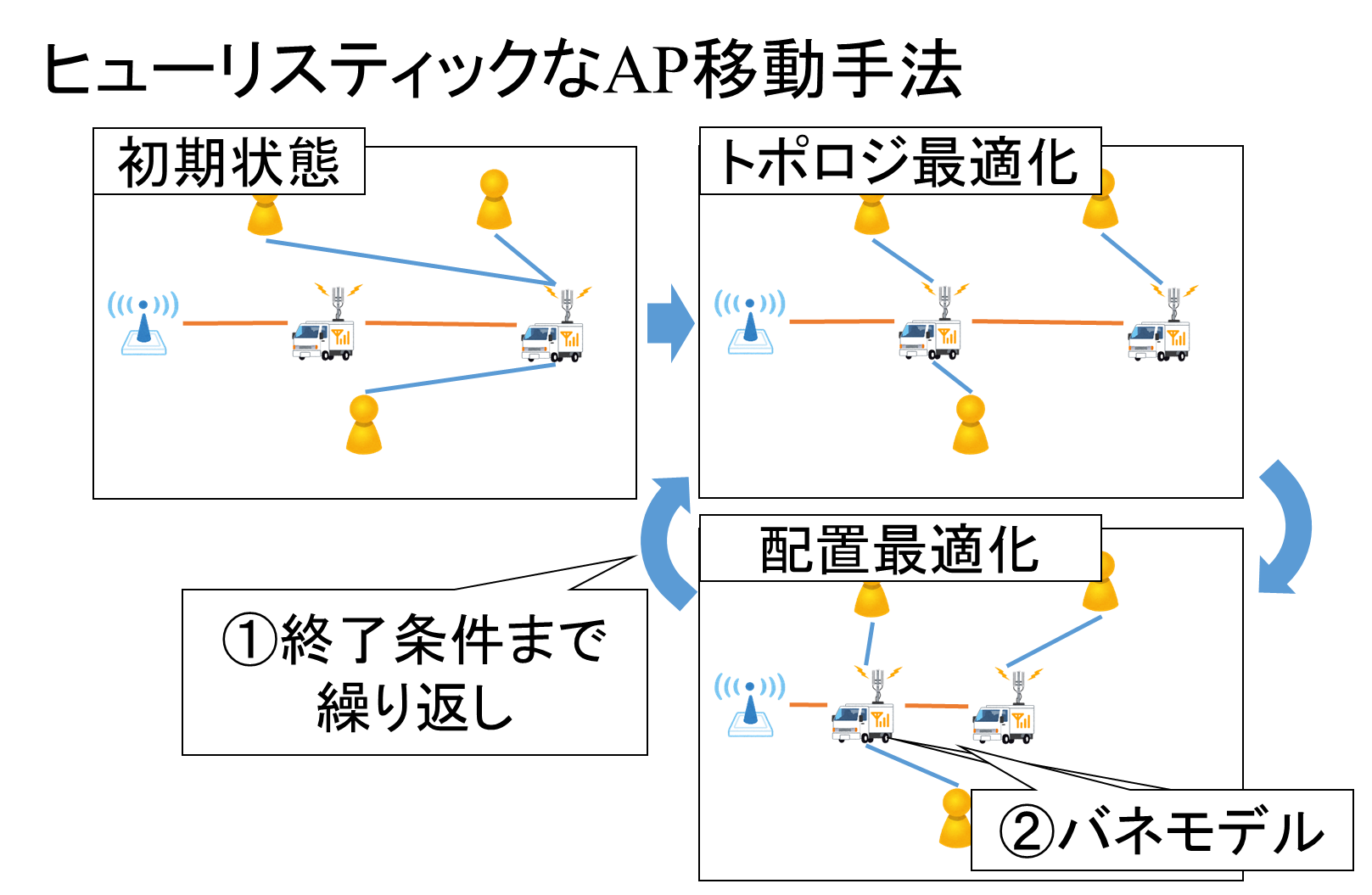
図C. ギザギザトポロジー
図E. AMRによるアドホックネットワーク構成と、アドホックネットワークによる高速通信サービス
図F. AMR制御
図G. 自転車をAMRに見立てて、多様な速度での通信実験(その1)
図H. 自転車をAMRに見立てて、多様な速度での通信実験(その2)
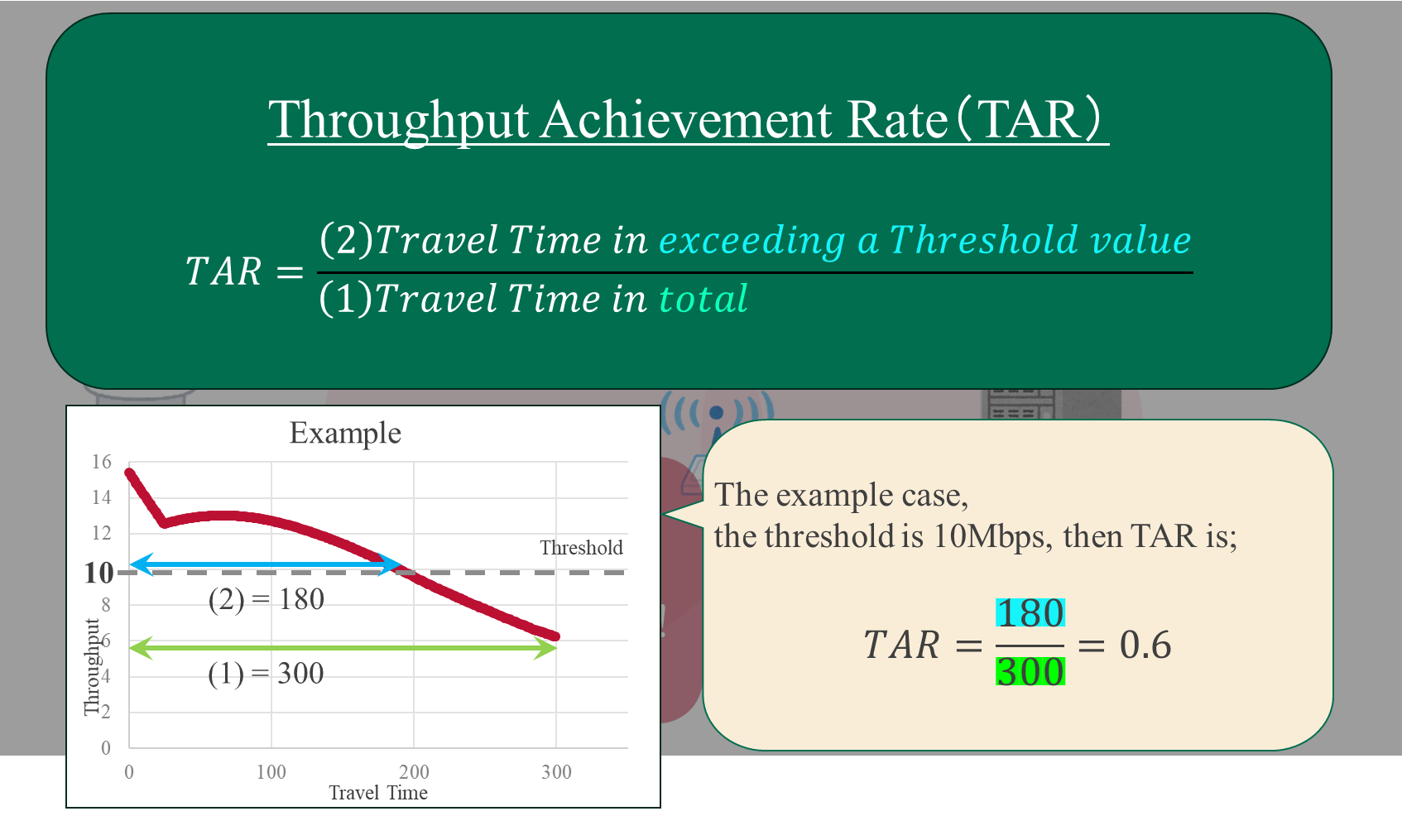
図I. スループット維持率
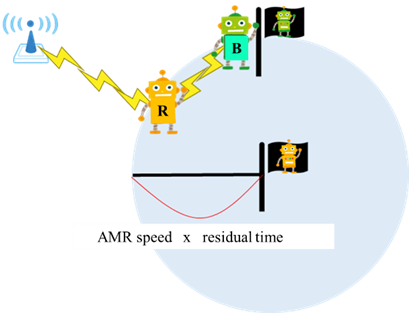
図J. 寄り道度合いの製薬範囲内で目的地に帰着するための中継AMRポジション
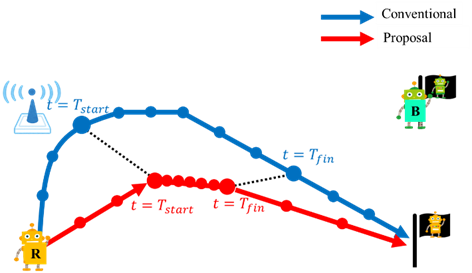
図K. 幾何学アプローチを用いた寄り道度に応じた最適経路
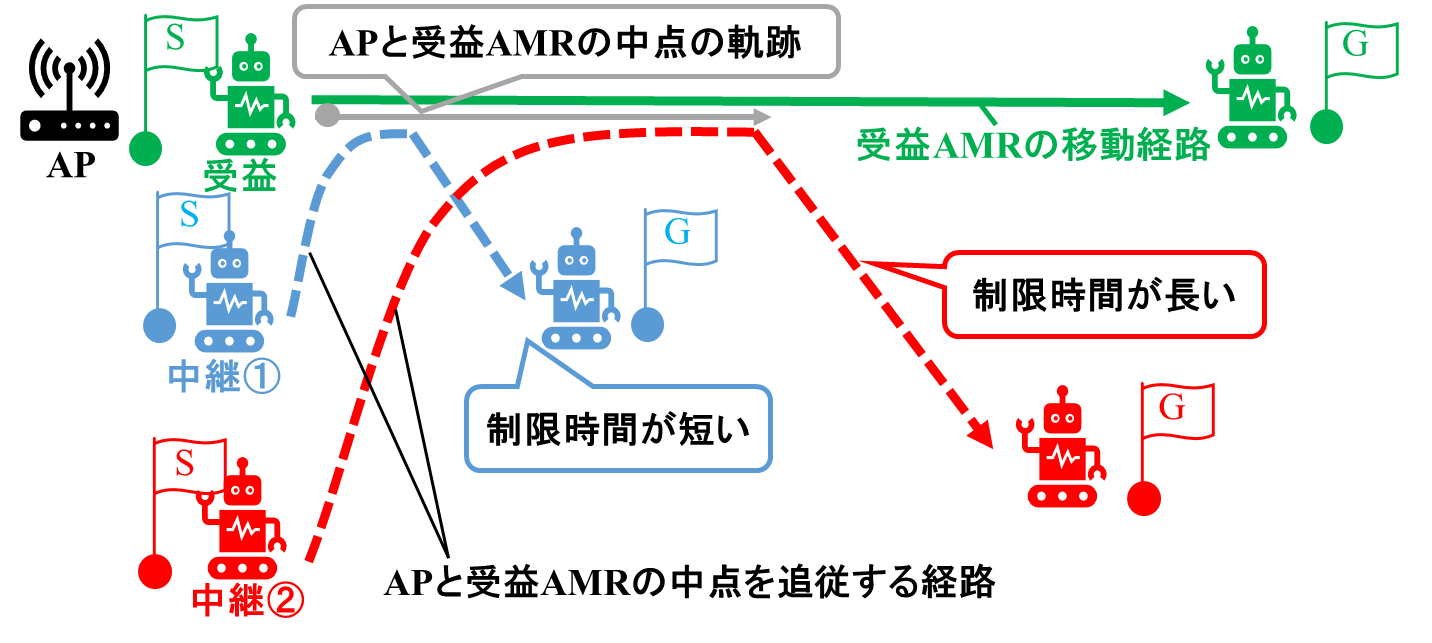
図L. 各々異なる位置と寄り道度合いを持つ複数の中継候補
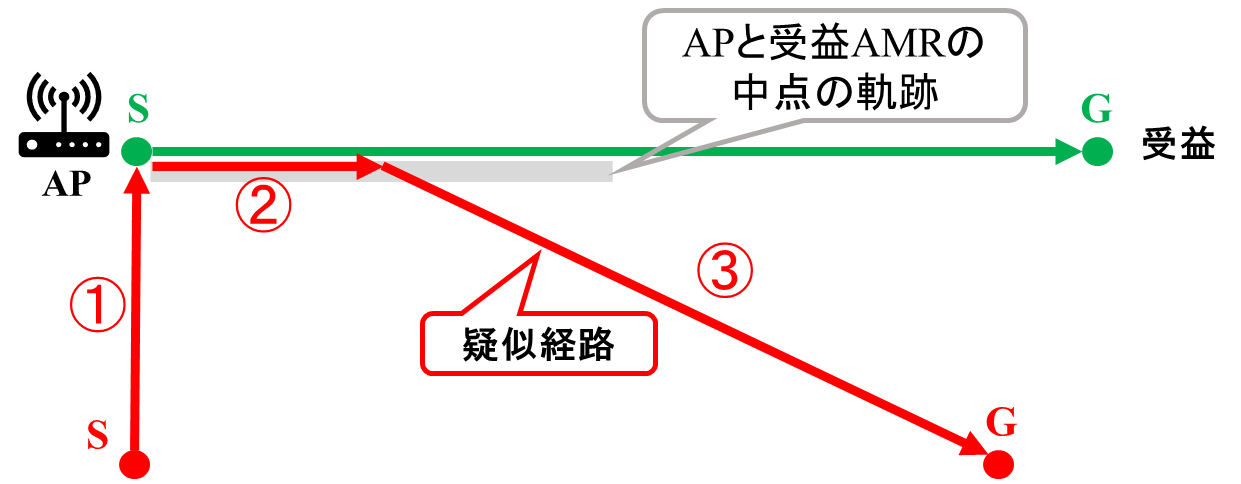
図M. 疑似経路
4 本研究が実社会にどう活かされるか―展望
AMRなどで、物流を支援することは喫緊の課題である。ロジスティックスの2024年問題に対しては、いろいろな工夫がなされているが、人間の効率化などには限界がある。AMRを用いたロボット化・自律運転化は、その本命と言える解決策であって、AMR本体の低コスト化が実現のカギを握る。今回の成果により、ネットワークを用いることで、AMR本体に高価格なプロセッサーを搭載する必要性が小さくなった。
これにより、低価格なAMRを実現することができる。すなわち、低価格な、自動配送ロボット、低価格な電動自動運転車椅子、低価格なお買い物支援ロボットなどが実現できる。これらは、今後の、ロジスティック全般を助けるだけでは無く、老齢化が進む日本・世界において、市民の「足」となる機材を安価に提供できることを意味する。
5 教歴・研究歴の流れにおける今回研究の位置づけ
名古屋大学・情報基盤センター・教授 村瀬勉は、ユーザ(通信者)が、通信事業者と協力することで、全体のコストを低減し、ユーザの通信料金はそのままで高品質な通信をえるという方法を「ユーザ移動制御」として、長年取り組んでいる。この技術は、特に、AMRのような移動体通信では難しい。今回の補助事業により、移動体通信でも、「寄り道」という概念で、ユーザ移動制御が可能であることを確認できたことで、本技術のさらなる発展を後押しすることができた。
6 本研究にかかわる知財・発表論文等
[1] 牧野晃汰, 平井健士, 村瀬勉, “自律走行ロボットによるアドホックネットワークにおけるネットワーク内干渉を考慮したスループット向上のための移動経路・中継切り替え制御,” 電子情報通信学会信学技報, vol. 122, no. 146, IN2022-23, pp. 45-50, 2022年8月.
[2] K.Makino, T.Hirai and T.Murase, “Mobility Control of Avoiding Interference for Autonomous Mobile Robot Ad Hoc Networks,” IEEE International Conference on Consumer Electronics(ICCE2023), Jan. 2023.
[3]Yudai Shibuya, Yohei Hasegawa, Hiroyasu Obata, Tutomu Murase, “P Cooperative Mobility Control for Public Mesh Network,” "2023 IEEE International Conference on Consumer Electronics (ICCE), 1 — 6, 20230100.(論文スペースが極小のため、謝辞欄無し)
[4] 牧野晃汰, 平井健士, 村瀬勉, “自律走行ロボットを用いたアドホックネットワークにおける高スループットを持続させるための協調移動制御,” 電子情報通信学会信学技報, IN2023-, 2023年3月.
[5]竹内理紗, 村瀬 勉, “自律走行ロボットによるアドホックネットワークのための耐ネットワーク間干渉を考慮した寄り道経路,” 電子情報通信学会情報ネットワーク研究会, IN2022-71, 20230302.
[6]R. Takeuchi and T. Murase, “Longcut route of multiple autonomous mobile robots forming ad hoc networks to avoid interference from other networks,” 2023 International Conference on Consumer Electronics - Taiwan (ICCE-Taiwan), 485 – 486, 20230700.
[7]Kotaro Inaoka, Jiquan Xie, Masaki Takanashi, Satoshi Makido, Tutomu Murase, “Improvement of Throughput by User Cooperative Mobility with restricted position in Ad-Hoc Networks,” 2023 IEEE 13th International Conference on Consumer Electronics - Berlin (ICCE-Berlin), 20230902.
[8]R. Takeuchi and T. Murase, “Longcut route control of a relay-node under the effect of strong interference in an ad hoc network with multiple autonomous robots,” 2023 IEEE 14th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), 619 – 625, 20231000.
[9]R. Takeuchi and T. Murase, “Communication Quality Measurement with Real Machines of AMR Ad Hoc Network on Optimal Route Movement,” 2024 IEEE International Conference on Consumer Electronics (ICCE), 20240100.
[10]Kotaro Inaoka, Murase, “Higher Throughput Ad-Hoc Networks Considering Tree Density in a Forest,” 2024 IEEE International Conference on Consumer Electronics (ICCE), 20240100.
[11] Kota Makino, Takeshi Hirai, Tutomu MURASE, “Cooperative Mobility Control for Maintaining Required Throughput in Multiple Ad Hoc Networks with Autonomous Mobile Robots,” 2024 IEEE International Conference on Computing, Networking and Communications (ICNC 2024), pp. 1171-1176, 20240200.
[12]花澤悠磨, 村瀬 勉, “自律走行ロボットアドホックネットワークにおける中継ノード位置と制限時間を考慮した中継ノード選択手法,” 電子情報通信学会情報ネットワーク研究会, IN2024-3, 20240530.
7 補助事業に係る成果物
(1)補助事業により作成したもの
学術論文など
(2)(1)以外で当事業において作成したもの
なし
8 事業内容についての問い合わせ先
所属機関名: 名古屋大学 情報基盤センター (ナゴヤダイガク ジョウホウキバンセンター)
住 所: 〒464-8603愛知県名古屋市千種区不老町 IB電子情報館 西棟7階731室 情報科学研究科 村瀬勉研究室
担 当 者: 教授 村瀬 勉(ムラセ ツトム)
担当部署: 情報基盤センター (ジョウホウキバンセンター)
E-mail: tom@itc.nagoya-u.ac.jp
URL: https://www.mcn.itc.nagoya-u.ac.jp/